 |  |  |
|
9940| 2
|
WIFI 通讯四旋翼 微型四轴 折腾记 基于arduino,更新第二季 |
| ||
 |
 /2
/2 

 |QQ技术咨询1|QQ技术咨询2|商务合作微信1:xiaorgeek001|商务合作微信2:XiaoRGEEK|诚聘英才|Archiver|手机版|小R科技-WIFI机器人网·机器人创意工作室
( 粤ICP备15000788号-6 )
|QQ技术咨询1|QQ技术咨询2|商务合作微信1:xiaorgeek001|商务合作微信2:XiaoRGEEK|诚聘英才|Archiver|手机版|小R科技-WIFI机器人网·机器人创意工作室
( 粤ICP备15000788号-6 )
GMT+8, 2024-11-26 10:41 , Processed in 1.095510 second(s), 22 queries .
Powered by XiaoR GEEK X3.4
© 2014-2021 XiaoR GEEK



 发表于 2016-1-6 14:39:53
发表于 2016-1-6 14:39:53
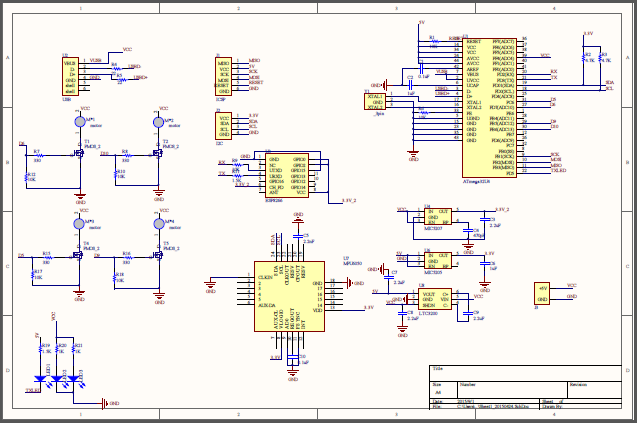 先上原理图
先上原理图

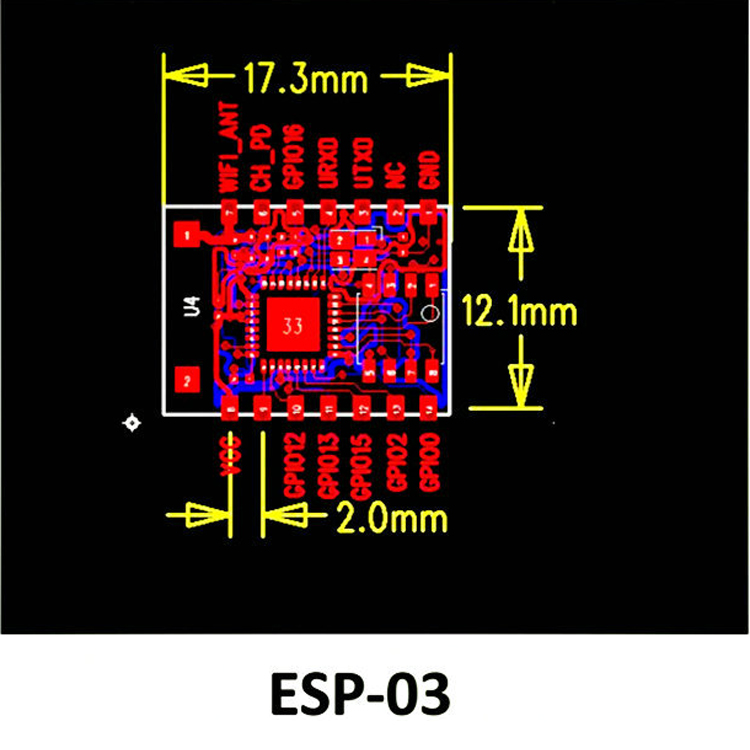
 然后根据原理图上的元器件绘制相应的封装库,很多网上都有自己可以下。
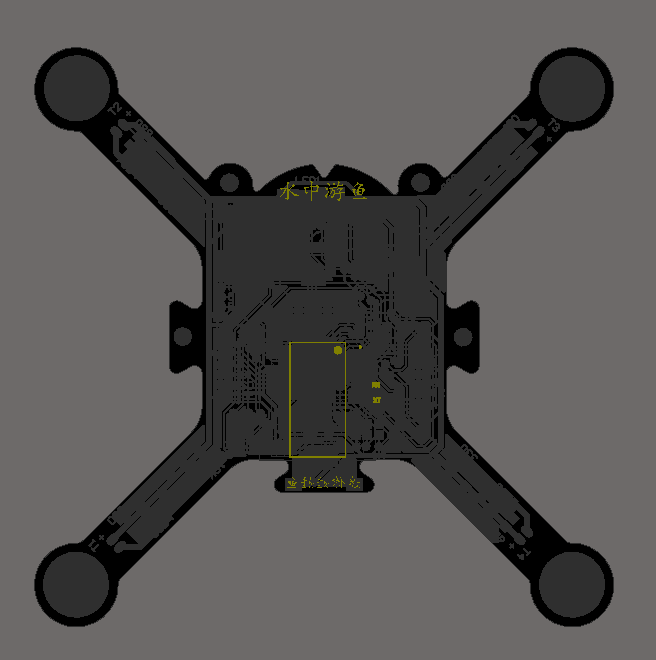
然后根据原理图上的元器件绘制相应的封装库,很多网上都有自己可以下。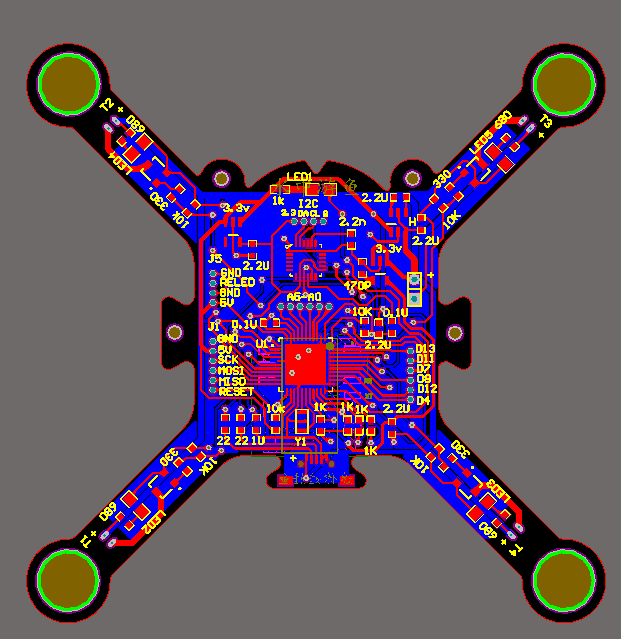 绘制PCB图需要注意的地方:
绘制PCB图需要注意的地方: 焊接的话也要注意一些东西:
焊接的话也要注意一些东西: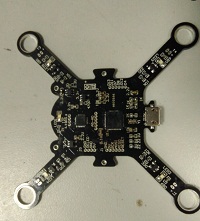 当然这是焊接贴片的必须工具,镊子烙铁等,最好带风枪的那种
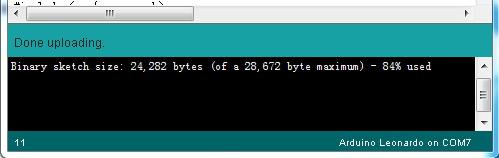
当然这是焊接贴片的必须工具,镊子烙铁等,最好带风枪的那种 接下来就是考程序了
接下来就是考程序了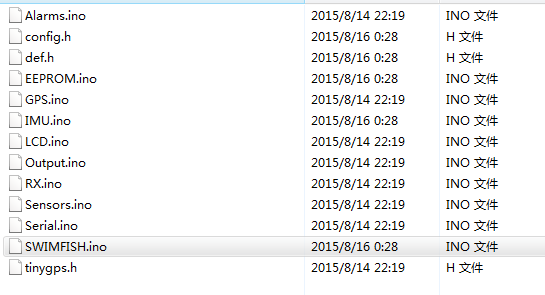
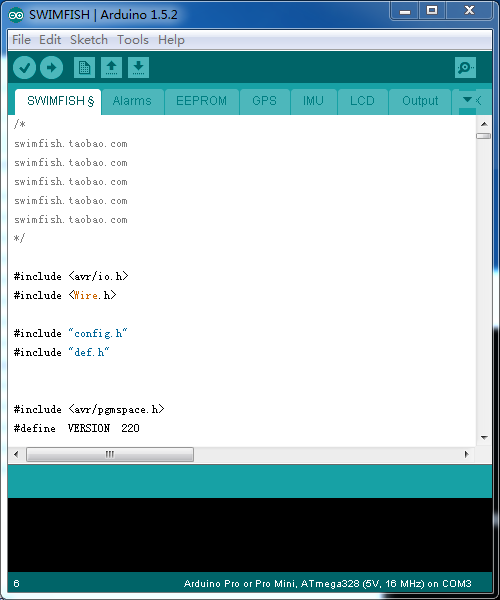
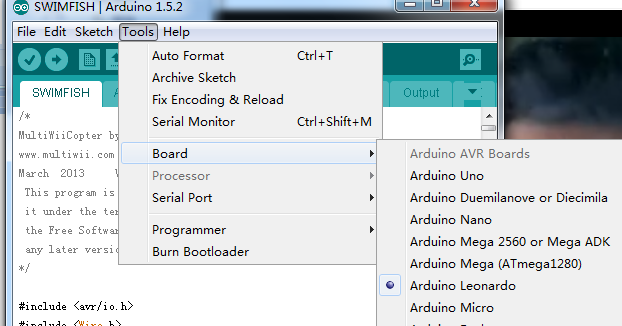
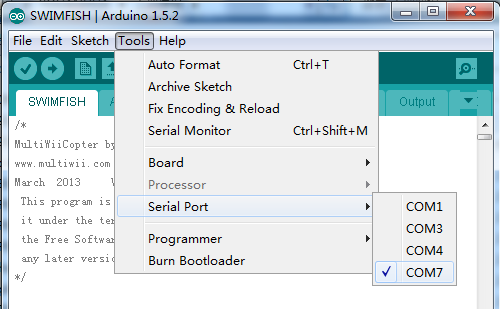
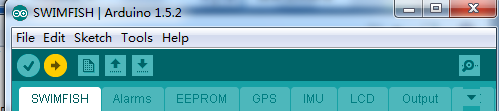
 飞控配置软件的使用
飞控配置软件的使用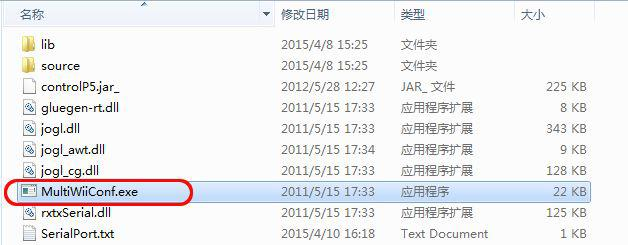


 楼主
楼主
